Поделка робот: оригинальные идеи и варианты изготовления из подручных материалов (185 фото)
Содержание:
- Troubleshooting
- Сборка рамы робота
- Вместо заключения
- Костюм робота из коробок, своими руками созданный
- Шаг 4. Весовые нагрузки
- Бижутерия робот
- Создание каркаса
- Простейший робот
- Что можно воспитать благодаря данному набору?
- Киборг из коробки
- Робот из «Лего»
- Костюм робота
- Печатная плата и электронные элементы
- Ход работы
- Порядок работы
- Заключение
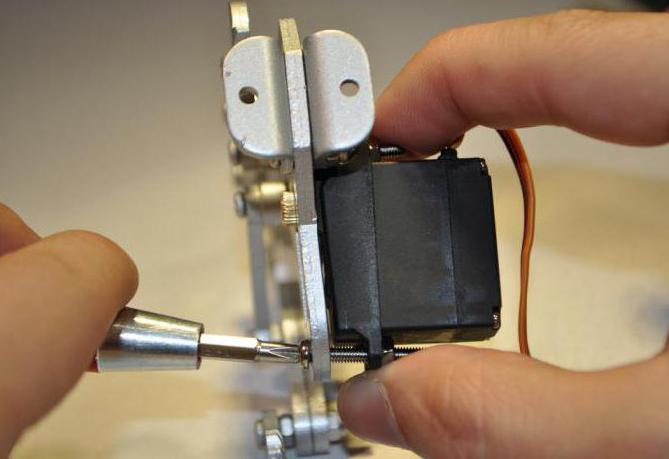
Troubleshooting
По возвращении домой меня ждал неприятный сюрприз, и хорошо, что он случился до публикации этого обзора, потому что теперь мы сразу обговорим troubleshooting. Решив попробовать подвигать рукой по максимальной амплитуде, удалось добиться характерного треска и отказа функциональности механизма мотора в локте. Сначала это меня огорчило: ну вот, новая игрушка, только собрана — и уже больше не работает.
Но потом меня осенило: если ты сам её только что собрал, за чем же дело стало? =) Я же прекрасно знаю набор шестерёнок внутри корпуса, а чтобы понять, сломался ли сам мотор, или просто недостаточно хорошо был закреплён корпус, можно не вынимая моторчика из платы дать ему нагрузку и посмотреть, продолжатся ли щелчки.
Вот тут-то мне и удалось почувствовать себя настоящим
робо-мастером!
Аккуратно разобрав «локтевой сустав», удалось определить, что без нагрузки моторчик работает бесперебойно. Разошёлся корпус, внутрь выпал один из шурупов (потому что его примагнитил моторчик), и если бы мы продолжили эксплуатацию, то шестерёнки были бы повреждены — в разобранном виде на них была обнаружена характерная «пудра» из стёршейся пластмассы.
Очень удобно, что робота не пришлось разбирать целиком. И классно на самом деле, что поломка произошла из-за не совсем аккуратной сборки в этом месте, а не из-за каких-то заводских трудностей: их в моём наборе вообще обнаружено не было.
Совет:
первое время после сборки держите отвёртку и плоскогубцы под рукой — могут пригодиться.
Сборка рамы робота
Чтобы собранная конструкция робота никому в доме не мешала, но при этом в любое время была готова к использованию, я разместил всю конструкцию на шкафу в гостиной. Для этого я взял старую полку и скрепил робот с этой полкой с помощью винтовых зажимов. Затем я прижал полученную конструкцию зажимами к верхней части шкафа и закрепил универсальными креплениями Command с задней стороны полки. Полоски Command обеспечивают дополнительное крепление, предотвращающее поворот полки, расположенной поверх шкафа, а также обеспечивают возможность определённой регулировки – я могу легко двигать полку вперёд или назад. Другими словами, я могу размещать холст на разной глубине.
Вместо заключения
Основное отличие между обычным программированием и программированием роботов заключается в том, что программист только пишет код, а робототехник еще взаимодействует с механикой, электроникой и окружающей реальностью.
 Робототехник всегда должен следить за окружающей его реальностью. Меняются обстоятельства, соответственно, меняются и показания датчиков. Камера робота может перестать распознавать цвета и объекты, и все это нужно предусмотреть
Робототехник всегда должен следить за окружающей его реальностью. Меняются обстоятельства, соответственно, меняются и показания датчиков. Камера робота может перестать распознавать цвета и объекты, и все это нужно предусмотреть
Легче всего простейшие алгоритмы и логика языков даются в детстве. В «Робиксе» мы обучаем основам программирования даже дошкольников. Наши ученики начинают со Scratch, знакомясь с программированием в игровой форме, и дальше осваивают более сложные языки Python и C++. Ребята с увлечением создают собственные игры, роботов, а заодно готовятся к «взрослому» миру, где языки программирования в ряде отраслей уже давно перешли в разряд must have, а дальше их, может, и вовсе заменит искусственный интеллект. И понимание алгоритмов работы компьютера, умение ориентироваться в механике, электронике и сопутствующих технологиях – хороший набор навыков для профессии будущего.
Сохраните или поделитесь
Костюм робота из коробок, своими руками созданный
Популярный на западе праздник Хеллоуин прочно занимает свои позиции и в России. Теперь во многих учебных заведениях устраивается вечеринка, посвященная дню всех святых, когда и дети, и взрослые с удовольствием переодеваются в различных персонажей. Отличной идеей для костюмированной вечеринки может быть костюм робота. Для его изготовления вам понадобится:
- Подобрать две коробки для головы и туловища. Одну больше, а другую, соответственно, несколько меньше. Проверьте, чтобы в одну без труда проходила голова, а во вторую — туловище ребенка.
- Вырезать отверстие для головы в одной коробке, а во второй уберите нижнюю грань, также прорежьте сверху отверстие для головы и две дырки для рук.
- В коробке, которая должна служить головой робота, прорезать отверстие для глаз. Можно сделать антенны из проволоки и закрепить их изнутри.
- Покрасить и задекорировать обе коробки. Краску выбирайте серебристую, чтобы сымитировать стальной корпус робота.
- На руки и ноги надеть фольгированные трубы или просто обмотать их фольгой.
В таком сделанном своими руками костюме робота из коробки у вашего чада точно не будет возможности остаться незамеченным.

Шаг 4. Весовые нагрузки
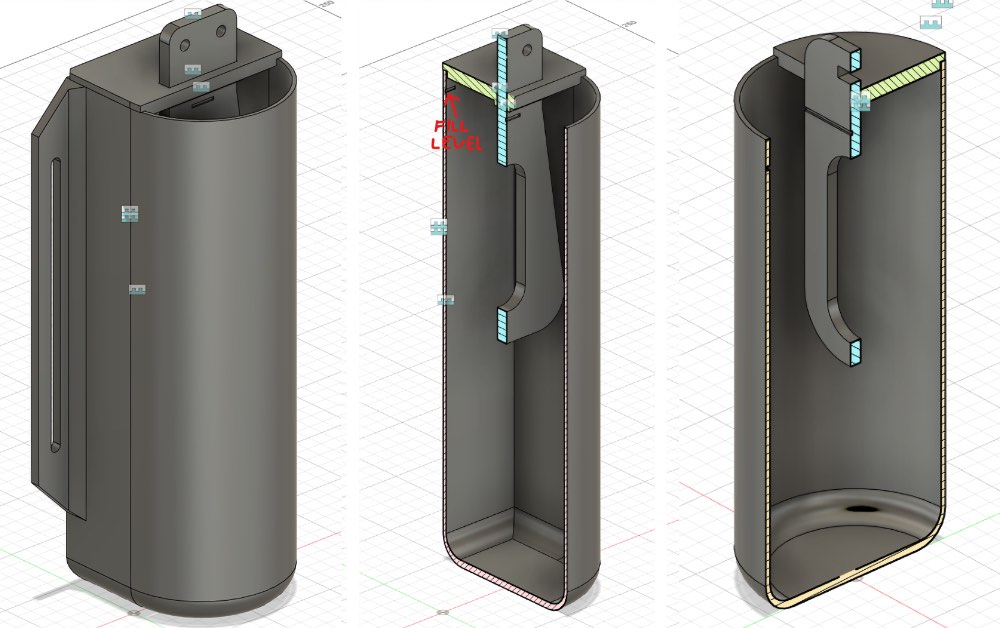

Движения робота возможны только благодаря действию гравитации. Для изготовления весовых нагрузок для робота я распечатал на 3D-принтере пластиковые оболочки, которые затем заполнил строительным гипсом. Перед затвердеванием гипса я вставил в оболочки распечатанную на 3D-принтере шпильку, с помощью которой можно легко манипулировать весовыми нагрузками робота.
Опытным путём я узнал, что оптимальный вес боковых весовых нагрузок составил около 300 г, а средней – около 530 г. Эти значения отлично подошли для размеров создаваемого мною робота. После того как мне стал известен вес, мне нужно было понять, какому объёму гипса он соответствует. Я провел ряд экспериментов с гипсом и рассчитал значение плотности: Rho = 1,435 кг/л.
Плотность используемого вами наполнителя может быть другой, но мне кажется, что большинство видов гипса для домашних работ, изготавливаемых из двух частей гипсового порошка и одной части воды, имеют примерно такие же значения плотности.
При расчёте объёма, необходимого для печати пластиковых оболочек, я применил расчётное значение плотности, после чего запустил 3D-печать оболочек соответствующего объёма.Теперь ценный совет: для распечатки весовых нагрузок я использовал полилактидный пластик. Это не водонепроницаемый материал, поэтому незатвердевший гипс может просачиваться через трещины в 3D-печати. Чтобы избавиться от этой проблемы, я с помощью кисти нанёс слой воска (для этого пришлось зажечь восковую свечу) на внутреннюю поверхность 3D-отпечатка. Теперь оболочка стала водонепроницаемой, и гипс будет надёжно удерживаться внутри неё вплоть до затвердевания.
Теперь нужно просто засыпать гипс в оболочки до уровня заполнения, отмеченного на рисунках. Пока гипс затвердевает, следите за держателями, чтобы они не сместились с места. Такие держатели можно удалить через 24 часа.
Шаг 5: Программа управления роботом
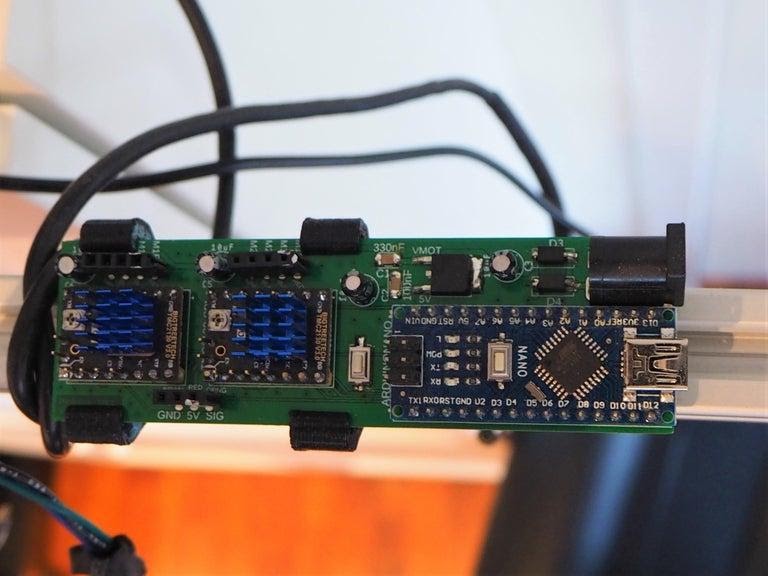
Главной программой, управляющей роботом, является программное обеспечение контроллера Arduino Nano. Контроллер обрабатывает входные команды, передаваемые через USB, осуществляет точные расчёты движения, посылает импульсные команды шаговым двигателям, а также перемещает манипулятор робота вверх и вниз либо для рисования линии, либо для простого перемещения по прямой.
На первом этапе можно загрузить файлы GERBER, разработанные мной для «мозга» робота, которые я заказал на сайте JLCPCB.com, любезно предоставившего спонсорскую поддержку этому проекту. На печатную плату нанесена понятная маркировка, для её изготовления используются стандартные компоненты. Процесс пайки предельно прост. Чтобы обеспечить простоту подключения/отключения двигателей, я припаял штыревые головки к шаговому двигателю и сервоприводу. Я припаял соответствующие штыревые головки к проводам сервопривода и двум шаговым двигателям.
-
Программируемый контроллер Arduino Nano.
-
2 бесшумных шаговых двигателя TMC2130.
-
4 цилиндрических алюминиевых конденсатора по 10 мкФ.
-
1 конденсатор 1206 на 330 мкФ.
-
1 конденсатор 1206 на 100 мкФ.
-
1 линейный регулятор напряжения LM7805 TO-252.
-
2 диода Шоттки MDD SS14, DO-214.
-
Нажимная кнопка 6,0×3,5 мм. Сейчас эта кнопка не задействована, я просто добавил её в конструкцию, так как она может понадобиться позже.
-
2 четырёхштырьковые гнездовые головки JST.
-
1 трёхштырьковая гнездовая головка JST.
Для подачи питания на электронные компоненты я использовал зарядное устройство для ноутбука, выдающее напряжение 19,5 В, но вполне можно использовать любой имеющийся блок питания, при условии, что он выдаёт от 7 до 35 В и не менее 1,5 А.
После завершения пайки загрузите в Arduino код (см. первый шаг).
Важное замечание: не забудьте подключить мою библиотеку fork of the stepper, которую можно загрузить из моего хранилища github. Мне пришлось исключить ненужную функцию, вызывавшую ошибку – линии рисовались не прямо, а с точкой перелома
Если бы вы знали, сколько времени у меня ушло на поиск этой неисправности и отладку!
Бижутерия робот
Если вы любите оригинальную бижутерию – вам отлично подойдут серьги в виде роботов, выполненные своими руками.
- Для этого понадобится минимум материалов – только проволока и крупные бусины.
- Сначала вам необходимо разрезать проволоку на несколько частей.
- Скручивайте проволоку в спирали – они должны быть достаточно плотными. Для этого накручивайте проволоку на стержень.
- Проволока, четыре спиральки, а также две бусины – это набор элементов, из которых вы сформируете головку робота.
- Кончик проволоки проденьте в бусину и разогните, чтобы сформировать ручки. Одна рука – это пара спиралек, а также четыре бусины маленького размера.
- После того, как вы сложили ручки, переходите к изготовлению туловища и ног. Кончик проволоки продевается в бусину.
- Нога – это пара спиралек а также бусинка маленького размера. Вторая серёжка выполняется аналогично.
- Итак, стильная и необычная бижутерия готова!


А главное, у вас появится возможность организовать совместный досуг для всей семьи.

Создание каркаса
Нет никакого «идеального» способа создания каркаса. Почти всегда требуется компромисс. Возможно, вам нужен легкий каркас. Но может потребоваться использование дорогостоящих материалов или слишком хрупких материалов.
Вы можете захотеть сделать надежное или большое шасси. Хоты вы понимаете, что это будет дорого, тяжело или сложно в производстве. Ваш «идеальный» каркас или рама может быть очень сложным.Изготовление каркаса робота может потребовать слишком много времени для разработки и создания.
При этом простой каркас может быть не менее хорошим. Идеальная форма встречается редко, но некоторые проекты могут выглядеть более элегантно из-за своей простоты
Возможно другие проекты могут привлечь внимание из-за их сложности
Простейший робот
Как сделать легкого робота в домашних условиях? Сложно создать полноценную автоматизированную машину, а вот минимальную конструкцию собрать все-таки можно. Рассмотрим простейший механизм, который, к примеру, сможет совершать определенные действия в одной зоне. Понадобятся следующие материалы:
-
Пластиковая тарелка.
-
Пара щеток среднего размера для чистки обуви.
-
Компьютерные вентиляторы в количестве двух штук.
-
Разъем для батарейки 9-в и сама батарея.
-
Хомут и стяжка с функцией защелкивания.
-
Гайки.
Просверливаем в тарелке для щеток два отверстия с одинаковым расстоянием. Крепим их. Щетки должны располагаться на одинаковом расстоянии от друг друга и середины тарелки. С помощью гаек прикрепляем к щеткам регулировочное крепление. В среднее расположение устанавливаем ползунки от креплений. Для движений робота необходимо использовать компьютерные вентиляторы. Они подключаются к батарейке и параллельно размещаются, чтобы обеспечить вращение машины. Это будет некий вибрационный моторчик. В завершение необходимо накинуть клеммы.
В данном случае не потребуется больших финансовых затрат или какого-либо технического или компьютерного опыта, ведь здесь подробно описано, как сделать робота в домашних условиях. Достать необходимые детали нетрудно. Для улучшения двигательных функций конструкции можно использовать микроконтроллеры или дополнительные моторчики.
Что можно воспитать благодаря данному набору?
Уверенность в себе! Мало того, что у меня нашлись общие темы для общения с совершенно незнакомыми людьми, но мне также удалось самостоятельно не только собрать, но и починить игрушку! А значит, я могу не сомневаться: с моим роботом всегда всё будет ок. И это очень приятное чувство, когда речь идёт о любимых вещах.
Мы живём в мире, где мы страшно зависим от продавцов, поставщиков, сотрудников сервиса и наличия свободного времени и денег. Если ты почти ничего не умеешь делать, тебе за всё придётся платить, и скорее всего — переплачивать. Возможность починить игрушку самому, потому что ты знаешь, как у неё устроен каждый узел — это бесценно. Пусть у ребёнка такая уверенность в себе будет.
Киборг из коробки
Одно из самых простых решений на пути к тому, чтобы сделать робота – приобрести готовый набор для робототехники с пошаговым руководством. Этот вариант подойдёт также тем, кто собирается серьёзно заниматься техническим творчеством, ведь в одном пакете находятся все необходимые детали для механики: от электронных плат и специализированных датчиков, до запаса болтиков и наклеек. Вместе с инструкциями, позволяющими создать довольно сложный механизм. Благодаря множеству аксессуаров такой робот может послужить отличной базой для творчества.
Основных школьных знаний по физике и навыков с уроков труда вполне достаточно для сборки первого робота. Разнообразные сенсоры и моторы подчиняются пультам управления, а специальные среды программирования позволяют создать настоящих киборгов, умеющих выполнять команды.
Например, датчик механического робота может фиксировать наличие или отсутствие поверхности перед прибором, а программный код указывать, в какую сторону следует поворачивать колёсную базу. Такой робот ни за что не упадёт со стола! Кстати, по схожему принципу работают настоящие роботы-пылесосы. Помимо проведения уборки по заданному расписанию и умения вовремя возвращаться на базу для подзарядки, этот интеллектуальный помощник может самостоятельно строить траектории уборки помещения. Поскольку на полу могут располагаться разнообразные препятствия, такие как стулья и провода, роботу приходится постоянно сканировать предлежащий путь и огибать такие помехи.
Для того чтобы собственноручно созданный робот умел выполнять различные команды, производители предусматривают возможность его программирования. Составив алгоритм поведения робота в различных условиях, следует создать код взаимодействия датчиков с окружающим миром. Это осуществимо благодаря наличию микрокомпьютера, являющегося мозговым центром такого механического робота.

Робот из «Лего»
«Лего» — серия игрушек для детей, которая состоит в основном из деталей конструктора, соединяющихся в один элемент. Детали можно комбинировать, при этом создавая все новые и новые предметы для игр.
Собирать подобный конструктор любят практически все дети от 3 до 10 лет. В особенности детский интерес увеличивается, если из деталей можно собрать робота. Итак, чтобы собрать двигающиегося робота из «Лего», необходимо приготовить детали, а также миниатюрный мотор и блок управления.
К тому же сейчас продаются готовые наборы с деталями, позволяющие собрать самостоятельно любого робота. Главное — освоить приложенную инструкцию. К примеру:
- готовим детали, как указано в инструкции;
- прикручиваем колеса, если они есть;
- собираем крепления, которые будут служить поддержкой для моторчика;
- вставляем в специальный блок батарейку или даже несколько;
- устанавливаем двигатель;
- подключаем его к мотору;
- загружаем в память конструкции специальную программу, которая позволяет управлять игрушкой.
Как создать робота?
Когда речь заходит о роботах, мы представляем себе гигантскую машину с искусственным интеллектом, как в фильмах про Робокопа и т. д. Однако робот не обязательно должен быть большим и технически сложно сделанным устройством. В этой статье мы расскажем, как создать робота в домашних условиях. Сотворив собственного мини-робота, вы убедитесь, что никаких специальных знаний и инструментов для этого не потребуется.
Костюм робота
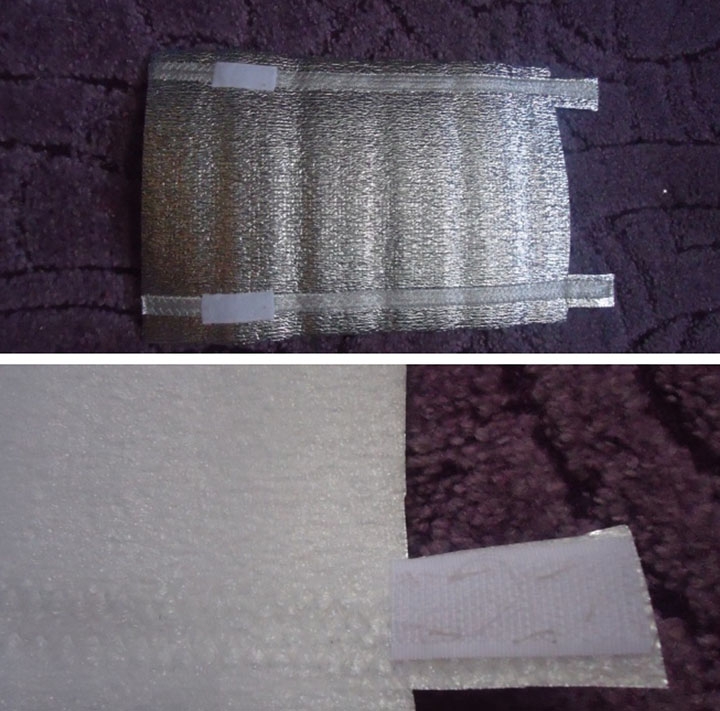
Костюмы из коробок, комбинезоны, имитирующие киборгов – это скучно. Сделайте своему ребенку наряд для маскарада из теплоизоляционного покрытия с алюминиевым напылением. Вариант бюджетный, не потребует временных затрат, делать его просто и быстро.

Кроме теплоизоляционного материала, для работы нужны:
- серебряная атласная лента шириной не менее 2 см длиной 2 м;
- лента-липучка – 40-50 см;
- ножницы;
- нитки, иголки.
Костюм будет состоять из 6 элементов – шапочка, жилетка, нарукавники и наколенники.

Вырезаем жилет. Центр детали – горловина.

В длину она должна быть равной двум меркам от плеча до талии (ДСТ). По ширине – мерке ширина плеча (ШП) + 10-15 см.

В горловину, вырезанную в центре детали, должна легко проходить голова ребенка.
Из термоизоляции вырезаем пояс шириной 7-10 см, пришиваем его к жилету, оставив сбоку разрез. К краям пояса пришиваем ленту-липучку – это застежка.

Шлем робота делаем из «крестовины» и поперечины. Крестовина должна закрывать голову ребенка, а поперечная деталь по длине быть равной обхвату головы + 5 см на соединительный шов. Скреплять детали шлема-шапки можно только ручным швом. Степлер не подойдет – острые скобы могут поранить ребенка.

Нарукавники и наколенники – прямоугольные куски теплоизоляции с пришитыми элементами ленты-липучки.
Такой костюм надевается поверх однотонных штанишек и водолазки. Его можно декорировать яркими элементами из мишуры, блесток, если малыш идет в нем на новогодний маскарад.

Робота можно сделать своими руками из чего угодно, из любых материалов, деталей, оказавшихся под рукой. Фантазируйте, ошибайтесь, переделывайте, дополняйте.
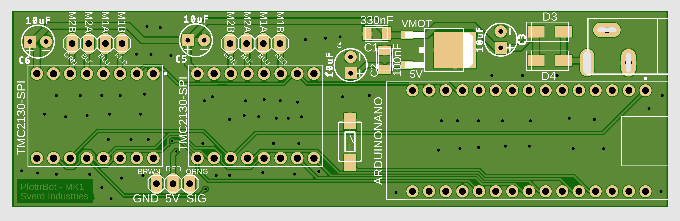
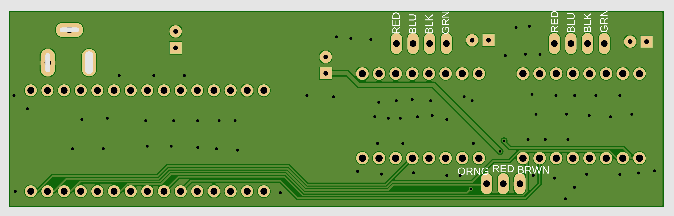
Печатная плата и электронные элементы
-
Программируемый контроллер Arduino Nano.
-
2 бесшумных шаговых двигателя TMC2130.
-
4 цилиндрических алюминиевых конденсатора на 10 мкФ.
-
1 конденсатор 1206 на 330 мкФ.
-
1 конденсатор 1206 на 100 мкФ.
-
1 линейный регулятор напряжения LM7805 TO-252.
-
2 диода Шоттки MDD SS14, DO-214.
-
Нажимная кнопка 6,0×3,5 мм. Сейчас эта кнопка не задействована, я просто добавил её в конструкцию, так как она может понадобиться позже.
-
2 четырёхштырьковые гнездовые колодки с JST.
-
1 трёхштырьковая гнездовая колодка с JST.
-
Источник питания: 7–35 В, мин. ток 1,5 A.
Шаг 1. Как создаётся художественная работа


Вначале я рекомендую посмотреть видео – вы поймёте, как ведёт себя робот в действии и как его настраивать для создания художественной работы. Говорят, изображение заменяет тысячу слов, и теперь представьте, сколько слов заменит видео, в котором изображения сменяют друг друга 30 раз в секунду!
Чтобы использовать робот для рисования, зажимами я закрепил на его раме чистый холст. Затем я подвесил рисующую головку и перебросил ремни через шаговые двигатели, расположенные на углах рамы робота, и отцентрировал рисующую головку (перевел её в домашнее положение). В рисующую головку вставил перманентный маркер. Затем подключил робот по USB-кабелю к компьютеру, на котором запустил управляющее программное обеспечение. В компьютер я загрузил чёрно-белое изображение, созданное в программе Photoshop, а затем разместил рисующую головку в том месте холста, откуда должна начаться прорисовка. Чтобы рисующая головка попала в нужное положение, я отправлял на робот команды перемещения в пределах ограничительной рамки и подгонял расположение изображения до тех пор, пока оно не оказалось именно там, где нужно. Затем я дал команду отправки изображения на робот.
Наконец, робот завершил свою работу – на холсте появилось чёрно-белое изображение. И вот настал момент, когда я смог почувствовать себя настоящим художником. Я взял обычную акриловую краску, разбавленную двумя частями клея для декупажа Mod Podge. В итоге я получил акриловую глазурь, которую нанес поверх чёрных деталей. Холст окрасился красивыми цветами, при этом все чёрные детали сохранились и благодаря глазури приобрели особый блеск.И вы можете создать нечто такое же, это потрясающе!
Ход работы
Работа с иллюстрацией. Подберите иллюстрации, на которых изображены различные роботы. Рассмотрите их с детьми, проанализируйте строение роботов. Предложите смастерить роботов для формандцев (для оказания им помощи в умственном и физическом труде).
Работа с иллюстрацией «Роботы». Рассмотрите с детьми картинку с роботами (рис. 15) и проанализируйте ее.
Педагог. На какие строительные детали похожи части роботов? Сколько роботов изображено на картинке? Найдите роботов, собранных из одинакового количества деталей. Найдите двух одинаковых роботов. Покажите роботов, которых можно (нельзя) построить из данных деталей, и объясните почему.
Предложите детям смоделировать разных роботов из геометрических фигур, раскладывая их на бумаге; обвести фигуры фломастерами и получить контурные схемы роботов, затем расчленить их, конкретизировать. Затрудняющимся детям предложите соорудить такого робота из строительного материала и сделать чертеж с данного образца постройки.
Советы воспитателю
Соберите детские работы и оформите из них пособие по плоскостному моделированию «Роботы». Предлагайте его детям для игр.
Игра «Поиграем с компьютером». Предложите детям сделать чертеж робота с аксонометрического чертежа (рис. 16): «Рассмотрите изображение, проанализируйте его. Изобразите его вид спереди в левом нижнем квадрате экрана, вид сбоку в левом верхнем, вид сверху в правом верхнем». Предложите им выбрать строительный материал или конструкторы и сконструировать роботов по своему замыслу.
При анализе детских работ обратите внимание на оригинальность решений и на то, какие функции могут выполнять изображенные роботы. Игровые задания
Игровые задания
Развивайте конструкторские навыки детей и качества, необходимые для практической деятельности, являющейся основой интеллектуального развития (удовлетворение от умственной деятельности, стремление к выполнению заданий познавательного характера, творческая активность). Упражняйте детей в конструировании из строительных наборов, конструкторов «Лего» и др. по замыслу, по условиям, по темам («Космическая станции», «Планета Венера», по готовым планам, чертежам, рисункам, схемам; в самостоятельном построении объектов, строительстве по условиям («Построй робота, похожего на человека (на собачку, на паука, на Чудо-юдо и т. д.)», сборке конструкций по изображениям объемных моделей. Упражняйте в анализе построек; уточняйте представления детей о геометрических фигурах и телах.
Работа с иллюстрацией. Рассмотрите с детьми модели (рис. 17, проанализируйте, предложите соорудить по ним постройки, посоветуйте начать с наиболее простых моделей, изображенных в первом ряду.
Работа с иллюстрацией «Строительные детали». Дети раскрашивают детали карандашами в разные цвета (рис. 18).
Педагог. Рассмотрите строительные детали, изображенные на картинке, найдите и назовите одинаковые по форме детали. Найдите детали, одинаковые по форме, цвету, величине. Покажите детали, одинаковые по форме, но расположенные по-разному. Найдите детали, одинаковые по форме и величине. Покажите детали, которые изображены в таком положении, в котором они не могут стоять на столе.
Игра «Поиграем с компьютером». На иллюстрации (рис. 19) изображены разные многоугольники.
Педагог. Рассмотрите и сосчитайте фигуры. Почему эти фигуры называют многоугольниками? Сколько углов у этого многоугольника? Покажите фигуру у которой углов больше, чем у других фигур. Найдете многоугольник, у которого угол направлен внутрь. Нарисуйте фигуру, у которой три угла (четыре угла, нет углов).
Обратите внимание детей на три фигуры, у которых углы выделены толстыми линиями.Спросите: «Одинаковые углы или разные?». Предложите нарисовать такие углы и запомнить, какой угол называется прямым (острым, тупым)
Нарисуйте ромб. Обратите внимание детей на то, что у этой геометрической фигуры два тупых и два острых угла.
Игра «Придумай робота». Предложите детям придумать и нарисовать роботов, используя при этом все знакомые им геометрические фигуры.
Игра «Сконструируй робота по памяти». Один ребенок конструирует робота из конструктора, предлагает рассмотреть его в течение 1 минуты, затем прячет. Остальные дети должны собрать такого же робота.
Ключевые слова
Вид сбоку, объемная модель, многоугольник, ромб; прямой, острый, тупой угол.
Порядок работы
- Объедините вместе три бутылки, склеив их скотчем.
- Затем возьмите ещё три бутылки и скрепите их аналогичным образом. Объедините вместе эти заготовки, и у вас получится туловище робота квадратной формы.
- Теперь изготавливайте голову – для этого вам подойдёт бутылка, разрезанная пополам.
- Возьмите нижнюю часть. Приклеивайте её к основной конструкции при помощи клеевого пистолета или скотча.
- Настало время изготовить ноги робота, от них будет зависеть, насколько устойчивой получится поделка. Одна нога – это две пластиковые бутылки, скреплённые скотчем.
- Используйте клеевой пистолет либо скотч, чтобы прикрепить ноги к роботу.
- Для того, чтобы изготовить руку, берите фрагмент бутылки, кисть руки вырезайте из кусочка пластика.
- Другой кусок пластика, побольше, сверните в трубку и закрепите при помощи скотча. Прикрепляйте руки к роботу также при помощи скотча либо клея.
- Переходите к декорированию поделки. Глазами робота могут служить крышечки от бутылок. Рот можете нарисовать маркерами.

Можете добавлять другие детали, всё зависит только от вашей фантазии.
Заключение
В этой статье мы рассмотрели базовую структуру промышленных роботов. Теперь вы имеете представления какие компоненты составляют основу робота и где они расположены. Многие могут подумать, что нет необходимости знать как робот устроен, при рассмотрении вопроса внедрения роботов на свое производство. Тем не менее, эти общие знания помогут определить какой именно робот вам нужен, с каким потенциалом движений, точностью, количеством осей и каким инструментом оснастить для решения ваших производственных задач.
В нашем каталоге вы найдете подробные спецификации по роботам, а также информацию по их возможностям.
Чтобы выполнить вашу производственную задачу наиболее эффективным способом потребуется наиболее подходящий робот. Наши сотрудники всегда рады будут помочь в подборе робота и инструмента для него.